



IMU, 自動駕駛定位團隊“小而美”的隊員 
機械轉子式陀螺儀最核心部分是高速旋轉的陀螺轉子和陀螺主軸,通過在陀螺主軸上加一內環架,便構成單自由度陀螺儀(總共兩自由度)。在內環架外再加一外環架,便構成雙自由度陀螺儀(共有三自由度)。再輔以驅動陀螺轉子高速旋轉的力矩馬達,信號傳感器等,便構成了一個完整的陀螺儀。 機械轉子陀螺儀基于角動量守恒定律的兩個重要特性來實現角速度測量:定軸性和進動性。
2158
駕駛哥 ??? 4年前
OptiSystem應用:光纖陀螺儀系統設計 
光纖陀螺儀系統設計:DC檢測方法[1]使用理想元件,輸出光電流(I)為其中φs 是薩格納克相移 , Io 是以零角速度情況計算出的電流P 是光源光功率, σ 是光電檢測器的響應度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因為在耦合器處功率損失了一半。
2146
追光ing ??? 8月前
OptiSystem應用:光纖陀螺儀系統設計 
光纖陀螺儀系統設計:DC檢測方法[1] 使用理想元件,輸出光電流(I)為 (1) 其中 φs 是薩格納克相移 , Io 是以零角速度情況計算出的電流 (2) P 是光源光功率, σ 是光電檢測器的響應度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因為在耦合器處功率損失了一半。
1557
信光嗎 ??? 9月前
OptiSystem應用:光纖陀螺儀系統設計
光纖陀螺儀系統設計:DC檢測方法[1]使用理想元件,輸出光電流(I)為其中φs 是薩格納克相移 , Io 是以零角速度情況計算出的電流P 是光源光功率, σ 是光電檢測器的響應度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因為在耦合器處功率損失了一半。
1763
追光ing ??? 9月前
OptiSystem應用:光纖陀螺儀系統設計 
光纖陀螺儀系統設計:DC檢測方法[1] 使用理想元件,輸出光電流(I)為 (1) 其中 φs 是薩格納克相移 , Io 是以零角速度情況計算出的電流 (2) P 是光源光功率, σ 是光電檢測器的響應度(在我們的案例中等于
1875
信光嗎 ??? 8月前
OptiSystem應用:光纖陀螺儀系統設計
光纖陀螺儀系統設計:DC檢測方法[1]使用理想元件,輸出光電流(I)為其中φs 是薩格納克相移 , Io 是以零角速度情況計算出的電流P 是光源光功率, σ 是光電檢測器的響應度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因為在耦合器處功率損失了一半。
2403
追光ing ??? 1年前
OptiSystem應用:光纖陀螺儀系統設計 
光纖陀螺儀系統設計:DC檢測方法[1] 使用理想元件,輸出光電流(I)為 (1) 其中 φs 是薩格納克相移 , Io 是以零角速度情況計算出的電流 (2) P 是光源光功率, σ 是光電檢測器的響應度(在我們的案例中等于1)。在等式(2)中將光功率除以2是因為在耦合器處功率損失了一半。
2331
追光ing ??? 2年前
使用 COMSOL 對慣性傳感器進行仿真 
慣性傳感器使用的陀螺儀和加速度計非常小巧并且精確度高,用于確定與地球正交軸 x、y 和 z 相關的運動。使用 COMSOL Multiphysics? 軟件,我們可以對慣性傳感器的組件(包括 MEMS 陀螺儀和加速度計)進行建模。“你在這里”遇到“就這樣結束了”想象一下,一片暗黑色的天空中布滿了成千上萬的白點,它們排列成的形狀顯示出它們正處在銀河系。
2747
我是小能 ??? 3年前
三坐標檢測船舶慣導系統關鍵零部件的四孔行星定位結構幾何精度 
慣導系統內部關鍵零部件帶4孔定位,內裝光纖陀螺儀,安裝的陀螺儀需要保障準確的位置度及角度關系,因此,該零件需要對上下頂面的平面度,前后左右圓柱的同軸度、垂直度、各孔的直徑以及4孔兩兩同軸度及4孔的孔軸線交點位置,各孔之間角度有著很高的檢測精度要求。 該核心部件采用四孔行星定位結構,其幾何精度直接決定陀螺儀測量基準的可靠性。
2043
深圳市中圖儀器股份有限公司 ??? 9月前
abaqus 收斂性問題?
目前是建立一個單自由度的車輛在橋上跑,之前將車體設成剛體、車輪密度射程0假設車輪可忽略,這樣的情況下,我的步驟一加載重力可以收斂,到步驟二也可以讓車輛往前跑。但現在我也將車輪設成剛體,在步驟一就出現Too many attempts made for this increment這個問題,想請問需要如何解決?從圖片來看我的車輪旋轉了,請問要從哪裡改,才能使重力收斂
2194 5 3
姜瀚荃 ??? 2年前
案例14-基于Nelson-Vaugh轉子代表模型的軸組件轉子動力學 
軸承位置處繞旋轉軸的平動和轉動自由度受到約束。 不平衡質量對圓盤的影響由垂直于旋轉軸的兩個方向上的力表示。力施加在旋轉軸上與點質量相同位置的節點上。不平衡力的振幅等于質量乘以不平衡質量到自旋軸的距離。 以下輸入片段顯示了施加不平衡力的步驟: 分析和求解控制 模態分析 本節討論了包括和不包括陀螺效應的二維軸對稱模型的模態分析。
2768 3 2
龍飛宇 ??? 3年前
一期一會 | 什么是MEMS器件? 
比如,MEMS傳感器可用于檢測不同行業中的各種刺激,包括聲學、流體流動、溫度、壓力、半導體制造設備的真空度、慣性效應、磁場、化學品以及輻射等。MEMS傳感器器件的一些常見示例包括紅外探測器、磁力計、溫度傳感器和壓力傳感器等。MEMS加速計、陀螺儀和其它慣性傳感器被廣泛用于航空航天領域,在該領域中,一切都在高速運轉,所以傳感操作需要極高的精度。
2475
Ansys中國 ??? 4月前
轉子動力學 | 模態分析 附轉子動力學鐘一諤下載 
–由此產生的陀螺矩陣[g]對垂直于旋轉軸Z的平面上的自由度進行了配對。–由此產生的陀螺矩陣[g]將是斜對稱的。
3039 4 1
yiduan9255 ??? 3年前
說透互補濾波(1) - 線性互補濾波器從原理到實現 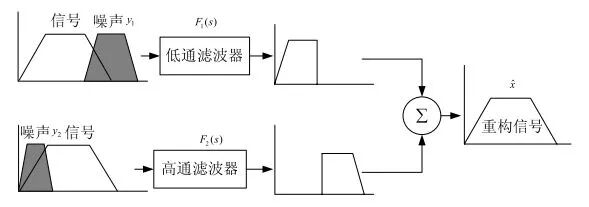
零初始狀態只用陀螺儀積分得到的陀螺儀,則非常平滑,無法感知到高頻部分的數據,但是靜止時得到的角度有偏離,不是0度,符合陀螺儀動態響應效果好的特點。傳統互補濾波器和Mahony濾波器確實都能夠結合兩者的特點,在15s處能得到更多的姿態信息。
3444 4 2
無人機干貨鋪 ??? 3年前
飛行器系統仿真與驗證 
圖5信號與控制庫元件模型 圖6 陀螺儀/加速度計/GPS等傳感器 以三軸陀螺穩定平臺的慣航系統為例,陀螺和加速度計被直接固聯在平臺上,直接測量運載體的角運動和線運動,將慣性敏感器輸出的量測信息經誤差補償后直接送至導航計算機中進行實時的姿態矩陣的計算,通過姿態矩陣把慣性導航系統中加速度計測量的沿運載體坐標系的比力信息,轉換到導航坐標系中,并求解出運載體的加速度的大小
3814 2 1
航發設計 ??? 3年前
10張高清大圖!讀懂十大國產MEMS廠商技術路線 
從技術上看,美新半導體近幾年的技術主要布局于半導體封裝、集成式傳感器、磁場傳感器、微機電系統器件測試等細分技術領域,致力于提高三軸陀螺儀集成度、使三軸陀螺儀結構整體合理緊湊、提高器件可靠性等。 五、上海矽睿科技股份有限公司矽睿科技成立于2012年,專注于高質量傳感器產品的設計、制造、以及增值應用與服務,致力于成為以應用為導向的多傳感器平臺。
2612 2 1
蘇格不拉底 ??? 3年前
“重新設計”——開瓶器 
09、陀螺開瓶器 設計:Nicholas Baker這款陀螺開瓶器是一個非常快速有效的開瓶器。鋁合金制成,經久耐用。陀螺玩具旋轉開瓶器和酒形影不離,每次旋轉都能讓人心情愉悅!
3984
工業設計學渣 ??? 3年前
稱重傳感器工作原理基礎參數 
稱重傳感器是什么設備1、稱重裝置稱重傳感器是一種將質量信號轉變為可測量的電信號輸出的裝置,主要有S型、懸臂型、輪輻式、板環式、膜盒式、橋式、柱筒式等幾種樣式,稱重傳感器按轉換方法分為光電式、液壓式、電磁力式、電容式、磁極變形式、振動式、陀螺儀式、電阻應變式等8類。 舊國標將應用對象及使用環境條件完全不同的“稱重”和“測力”兩種傳感器合二為一,對于試驗與評價方法未進行區分。
2074
MISUMI米 ??? 3年前
千耘導航QY410|常見故障及解決方案 
三、精準度低1、車輛問題解決辦法1、檢查方向盤轉向軸、轉向球頭以及液壓油缸連接處,如果間隙過大請維修。2、查看配重,如果配重不足請增加配重。調試問題解決辦法1、查看橫滾側傾值,如果過大請在水平路面上重新校準。
1840
千尋位置行業應用 ??? 3年前
穿透數據迷霧:2025 年可穿戴設備測試的技術突破與實踐路徑 
(一)多傳感器融合的精度校驗難題當前主流設備普遍采用 "加速度計 + 陀螺儀 + 生物傳感器" 的多模組方案,例如某旗艦智能手表集成了 12 種傳感器,數據交互復雜度較三年前提升 4 倍。這種融合帶來了兩個核心測試痛點:一是不同傳感器數據的時間同步誤差,二是復雜運動下的耦合干擾。某運動手環測試數據顯示,未校準前的跑步步頻識別誤差可達 15%,主要源于加速度計與陀螺儀的采樣頻率不同步。
2532
德基西瓜 ??? 7月前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
